Shared:2020W2G2P2
RB_RS COLLABORATIVE WORKSHOP
HvA Robot Studio Team: Jakob de Konink | Cameron Roeten | David 't Lam
The workshop focus on a general design of the structure towards a beam section that can be robotically produced.
In order to produce this beam section we will work on a digital data base of the wood we have available at the Robot Studio Lab and that could be stacked based on a packing strategy in order to robotically mill the necessary material.
Finally we will approach the production aspect by working on a digital simulation of the milling.
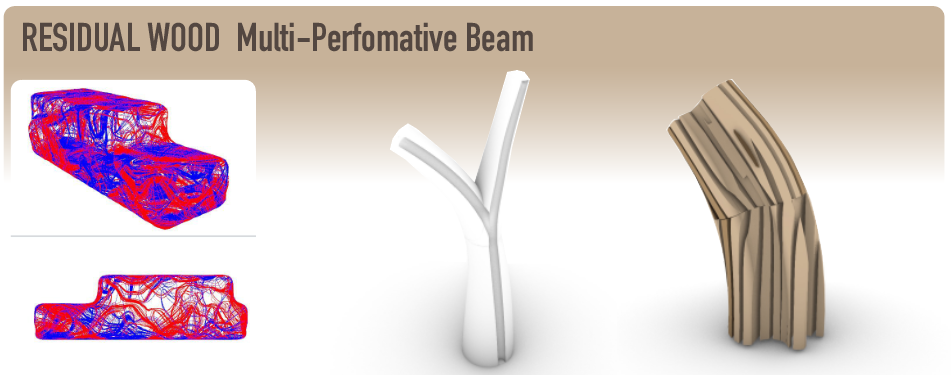
Material Scale
This scale focuses on exploring the wood residual stream and the digital possibilities of "packing" and using this stream in order to give a new structural and performative use. This scale also explores the idea of material digitalisation.

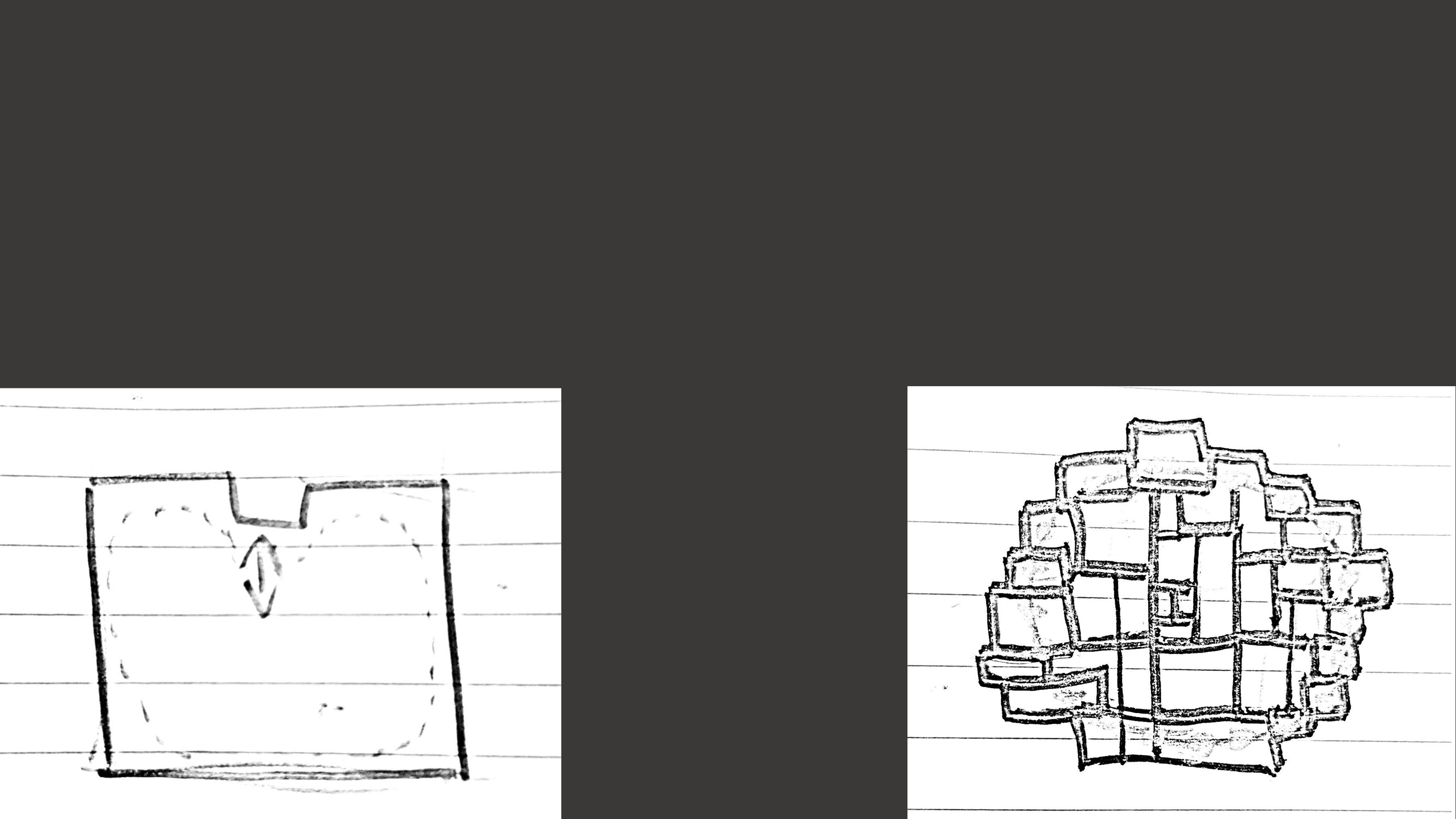
Ideas for packing viewed from below
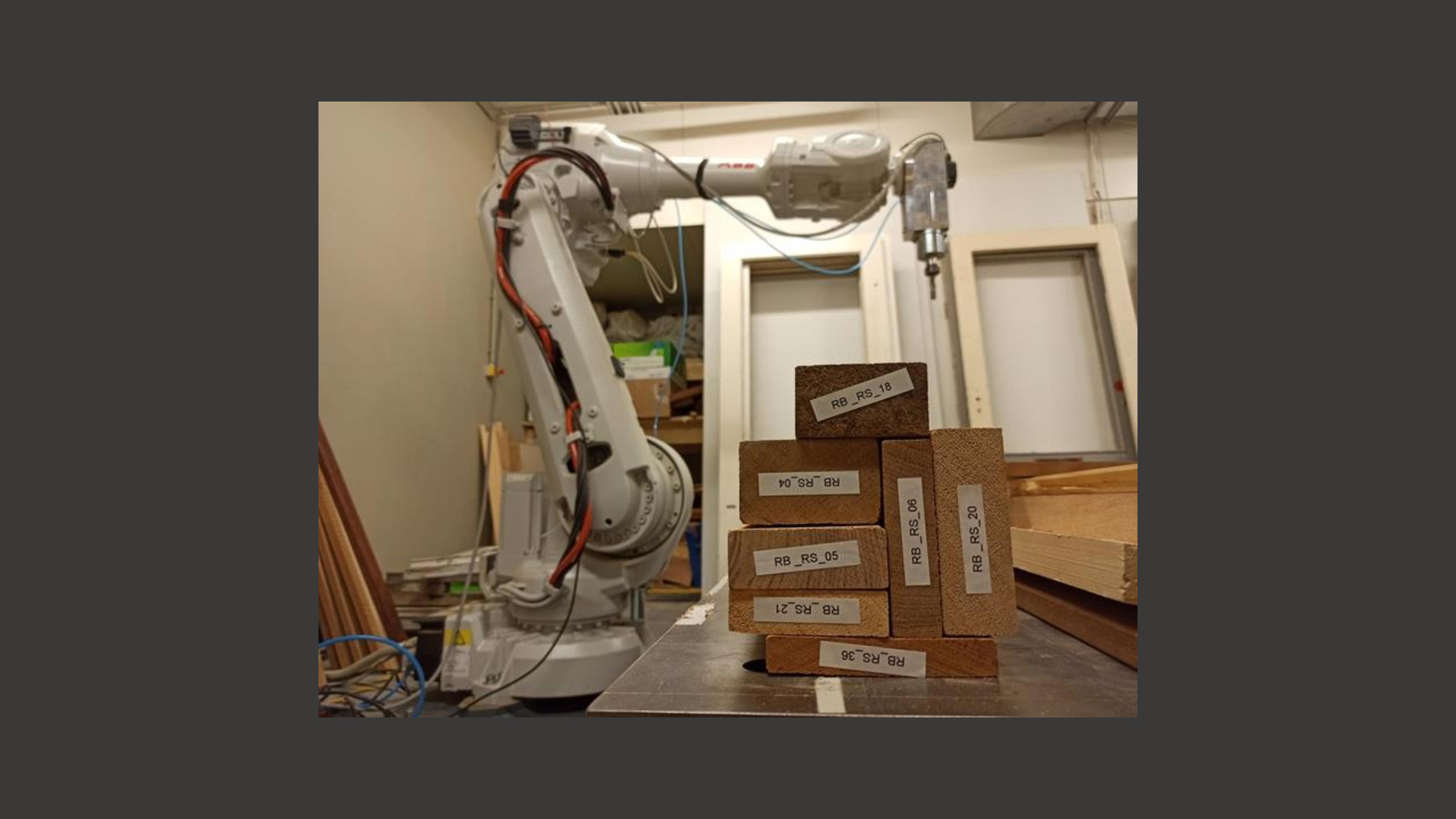
Idea for packing visualised in real life
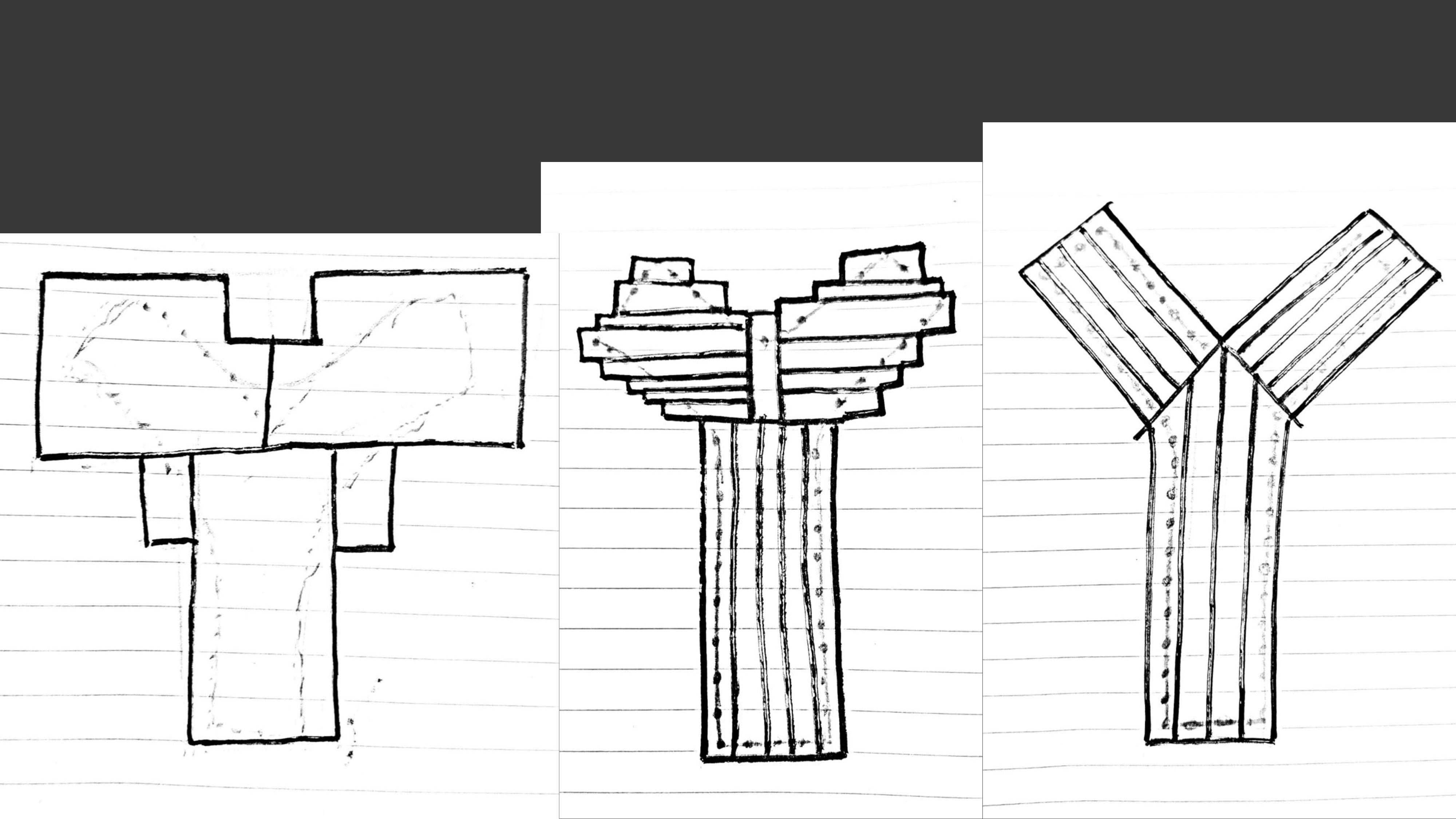
Ideas for packing, with multiple options in grain direction. The third option is the one we will be using for our design
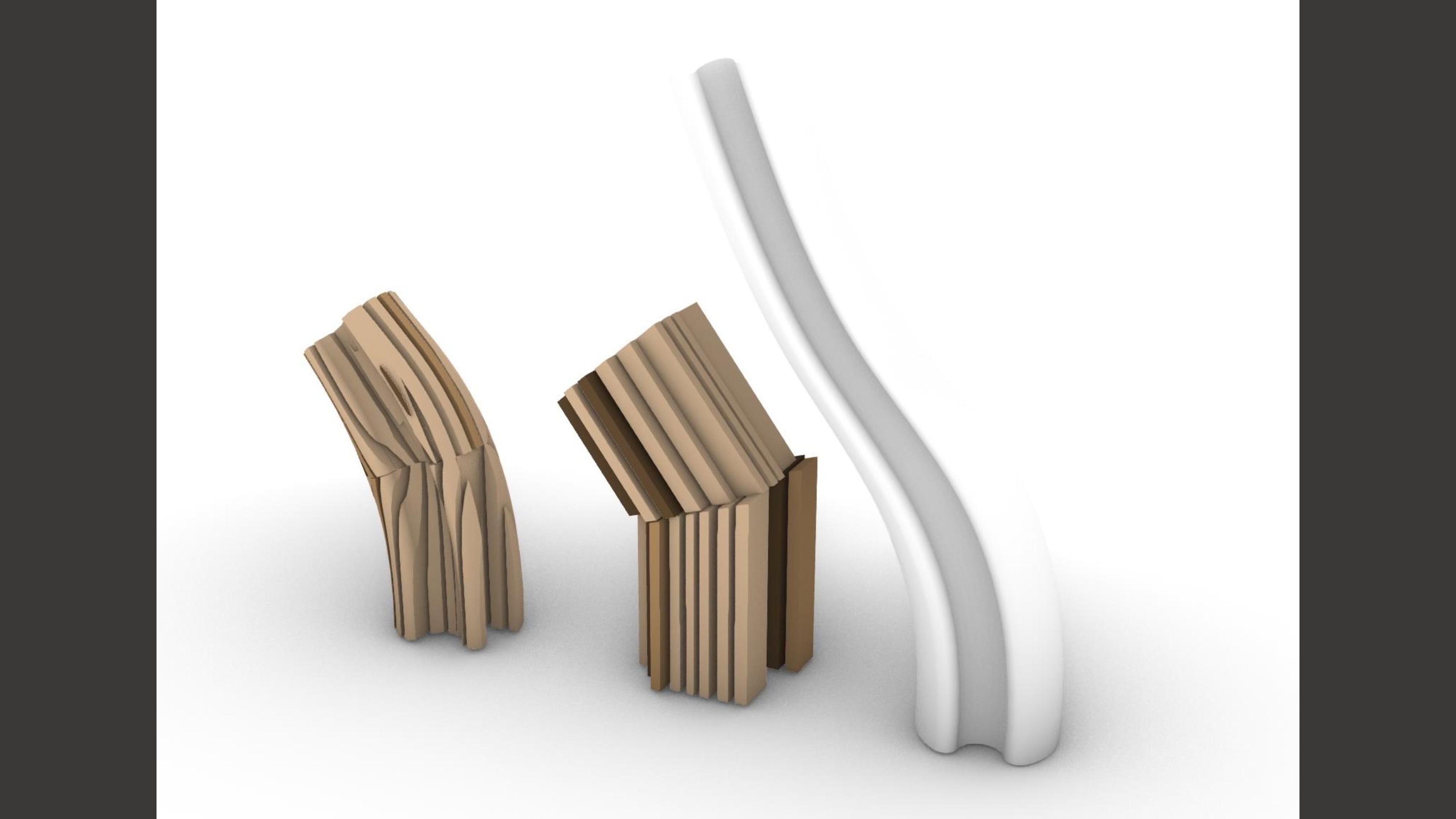
Packing idea visualised in Rhino
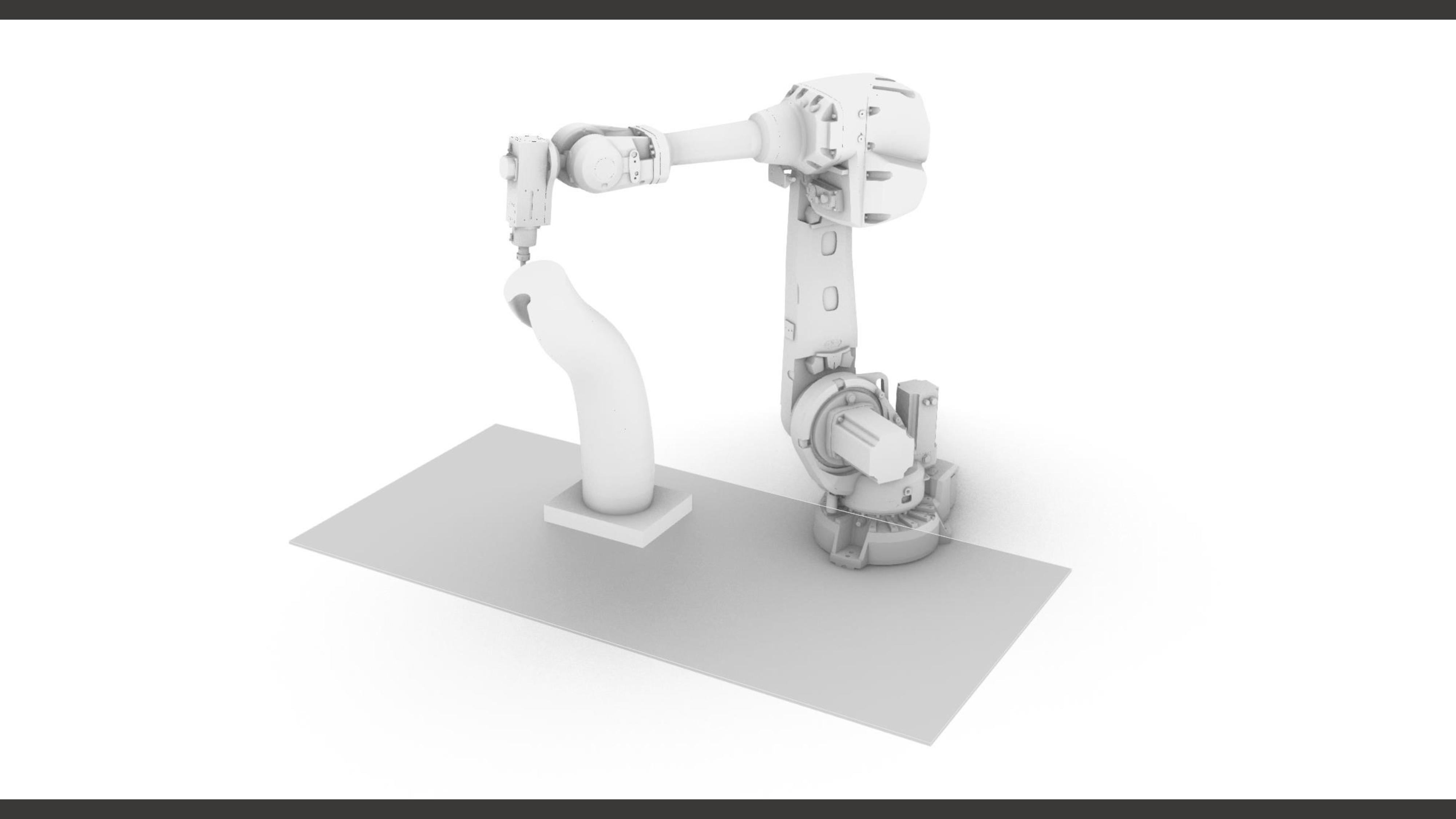
This is how the robot will mill the beam
Structure Analysis
Short text here talking about structure analysis and the parameters that where used.
brief description of the image
brief description of the image