Shared:2020W2G2P1
RB_RS COLLABORATIVE WORKSHOP
HvA Robot Studio Team: Jakob de Konink | Cameron Roeten | David 't Lam
The workshop focus on a general design of the structure towards a beam section that can be robotically produced.
In order to produce this beam section we will work on a digital data base of the wood we have available at the Robot Studio Lab and that could be stacked based on a packing strategy in order to robotically mill the necessary material.
Finally we will approach the production aspect by working on a digital simulation of the milling.
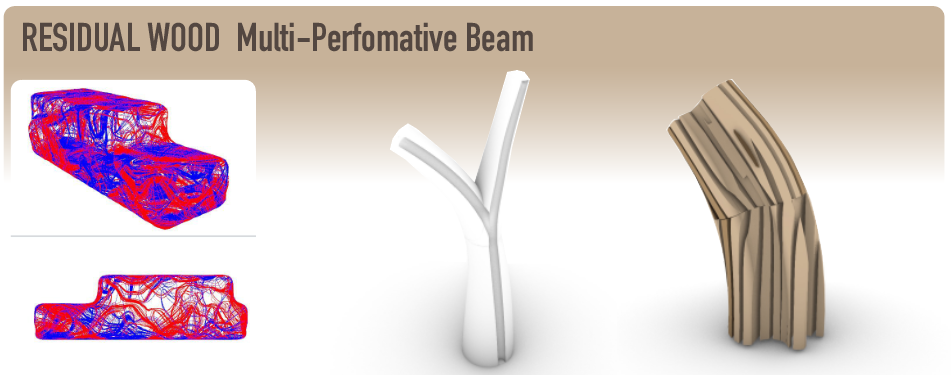
Beam Scale
This scale focuses on exploring the morphology of a section of the main beam structure in order to explore performance and production possibilities of the design.
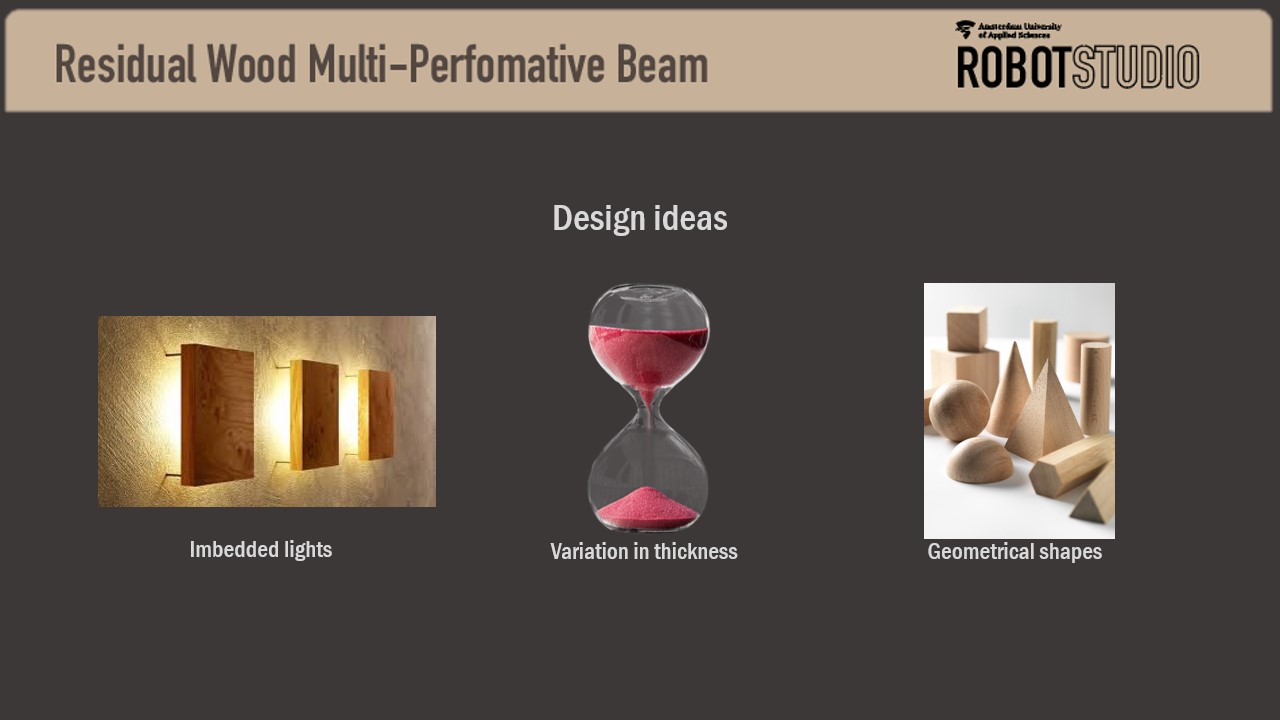
For the main design of the beam we started thinking about ideas of implementing lights in the design, as well as varying the thickness and creating geometric shapes.
Thickness and lights
Geometrical shapes
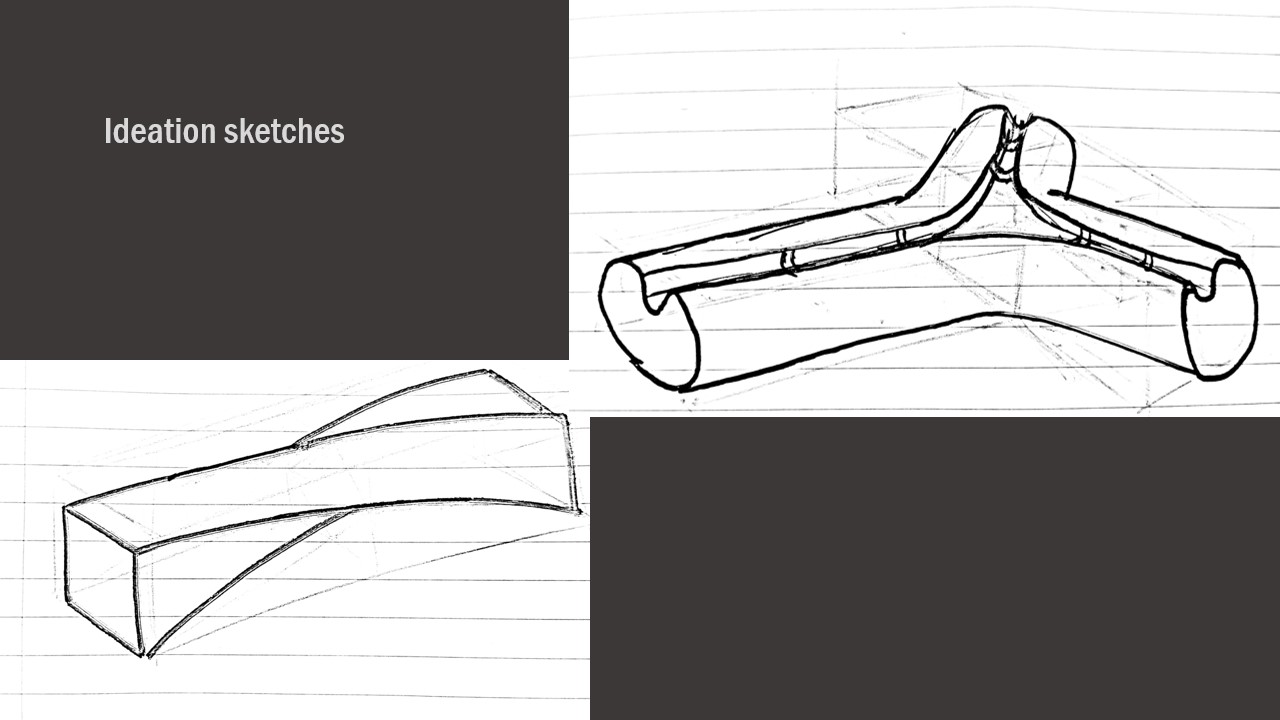
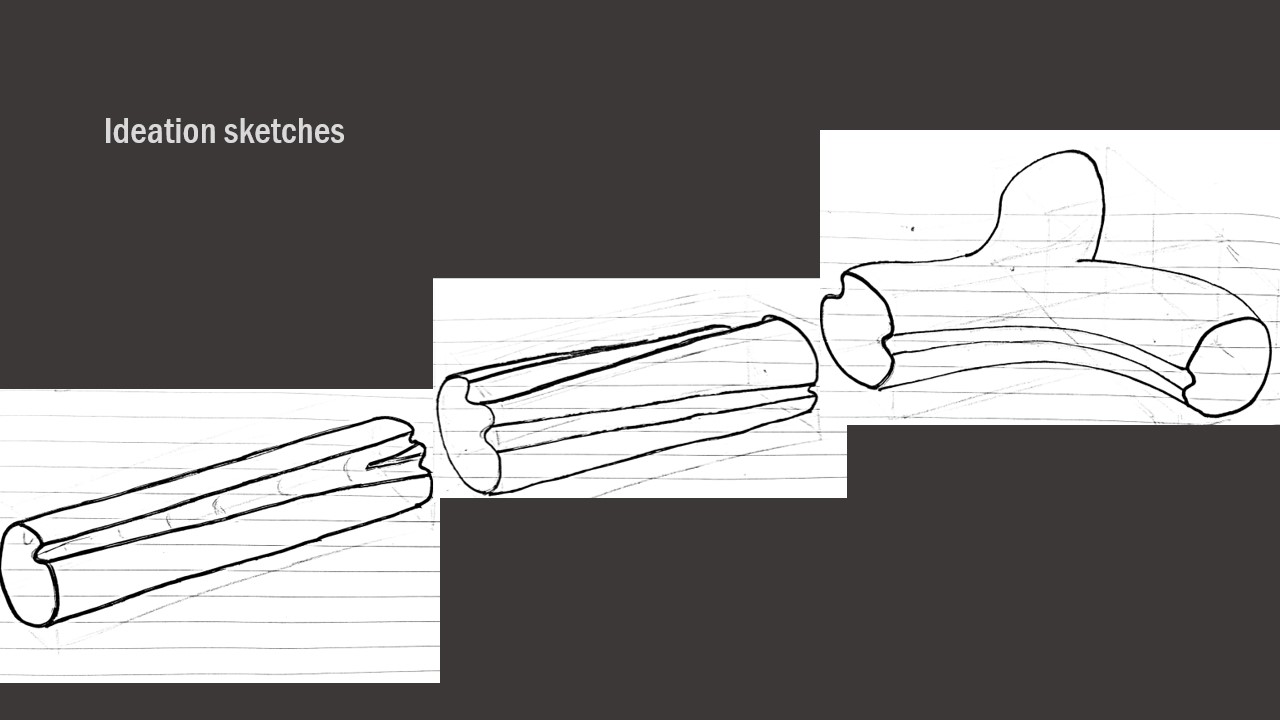
Transition of the lighting in different beams
Transition of the lighting combined in one beam, which is also our chosen design.
brief description of the image
Beam Design
Short text here talking about beam selection and its parameters

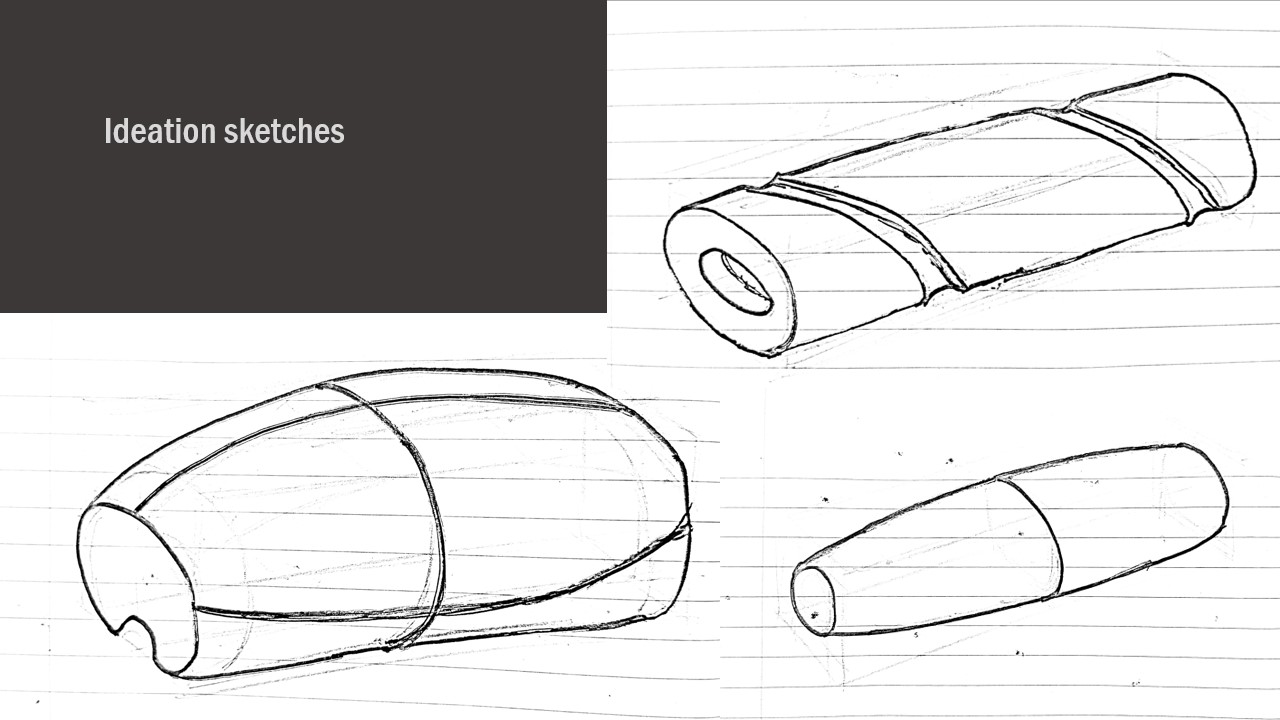
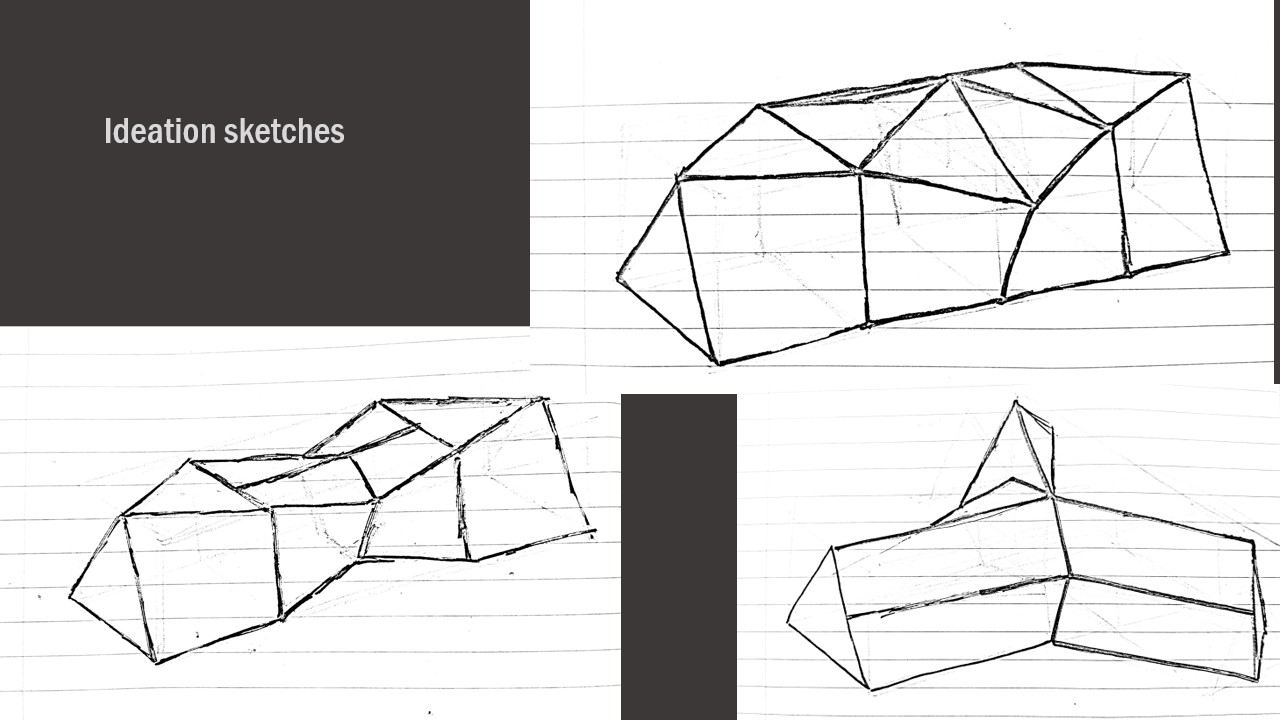
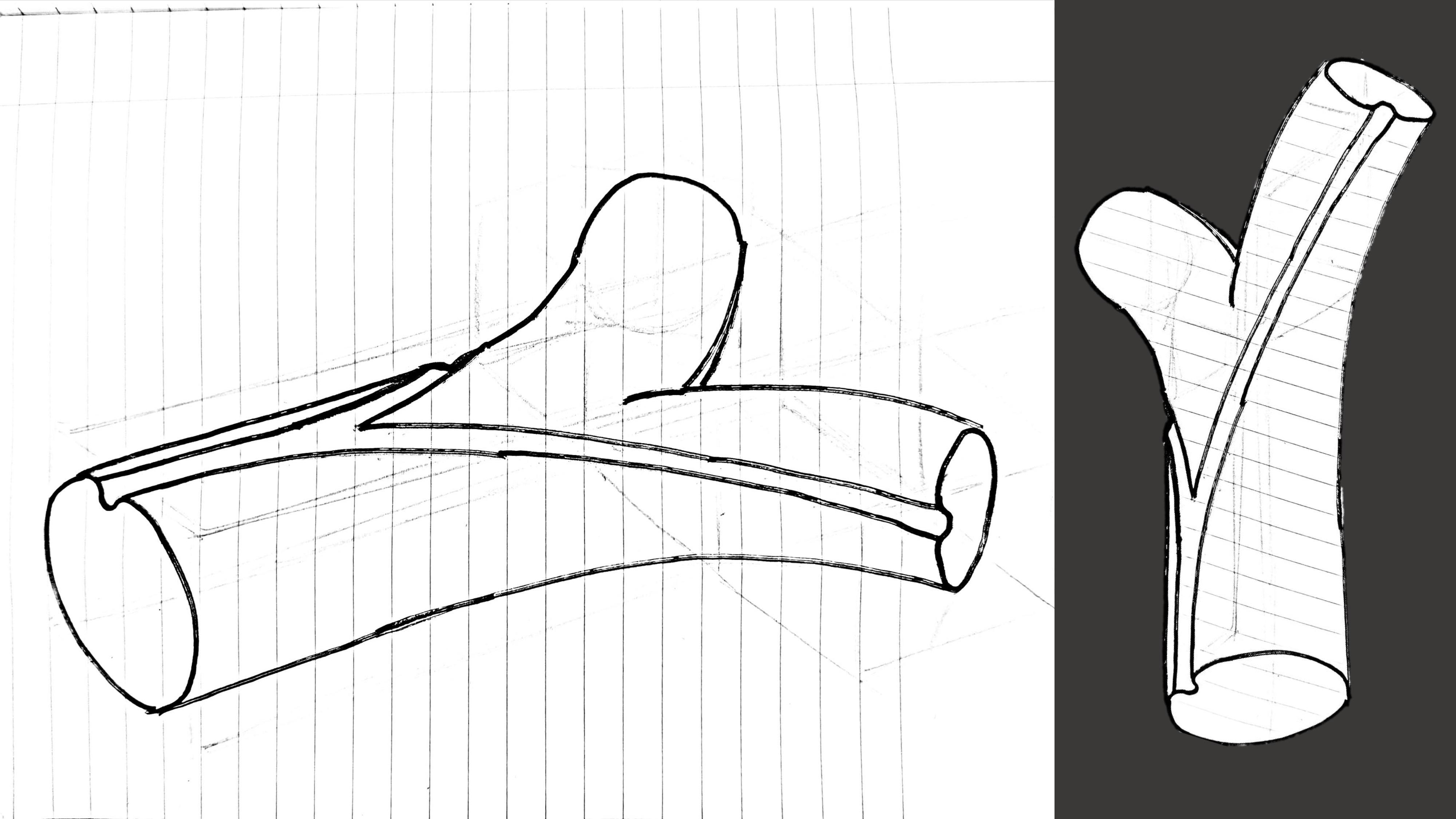
We looked at different shapes for our chosen idea.

We also varied in depth of the lights and added a possible twist.
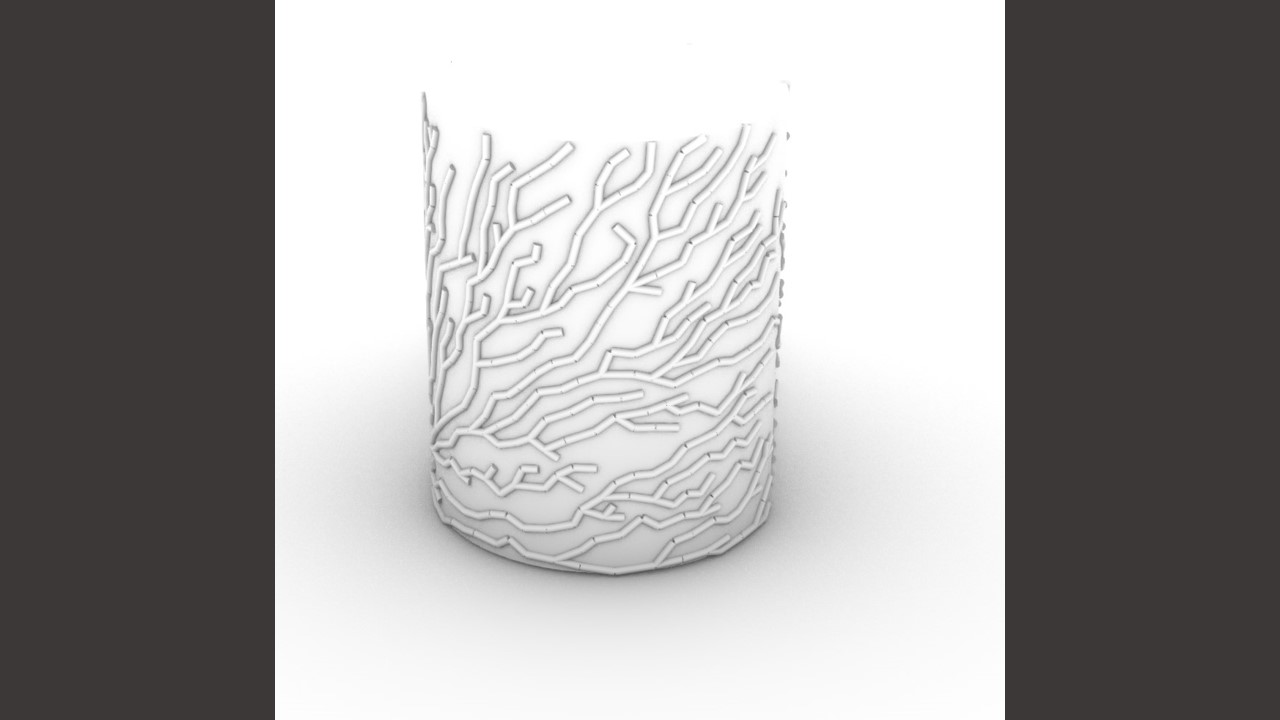
Applied a more organic design
This is our final design made in Rhino
brief description of the image