project01:Workshop 1
Check out Workshop page for more details or read the report below.
WORKSHOP RESEARCH REPORT
Introduction
In today's rapidly changing world of new technologies, automation, digitization and artificial intelligence, we should consider possible alternatives to shaping architecture. Architecture can be more kinetic, evolutionary over time, embody robotics solutions, and become responsive to our changing needs. What is needed is to identify the materials and systems that are best suited to create new forms that make adaptable architecture.
Architecture itself is an iterative process in seeking the best ways to shape our space. Each new object or space is an experiment that provides empirical arguments as to whether a given direction is worth continuing. As nothing contributes so effectively to the development of our field like architectural practice, it can be said that all architectural activity as a whole is research by design. Unfortunately, the heuristic specificity of architectural discipline makes it extremely difficult to compare the activities of various autors and the value of their objects. In particular, there is a lack of well-developed quantitative methods by which it is possible to precisely analyze and evaluate architecture as well as it is difficult to define what architecture should be. The empirical experience of architecture is the only effective way to understand it, which means that gaining knowledge by young adepts like myself can be a bit frustrating. Especially with the development of new technologies and access to big data, it seems that knowledge about how architecture works and how it should be designed could be more explicit.
The Robotic Building Studio (my graduation studio) tries to give a response to both of that problems. It is a studio which does experiment with new technology and brings back results which can be analysed. Typical for the "Robotic Building" studio is choosing one new technology relevant to architecture, in example, construction technology, for which the technical properties are then analyzed in order to find the innovative application of the material in architecture. Another important aspect is combining the design and production stages into one coherent process, so that modern design methods are reflected in production. The important part of that research process are workshops organized in the studio every few months.
I had the pleasure to participate in such workshops under the supervision of Henriette Bier, Arwin Hidding and Vera Laszlo in autumn 2019 as part of my graduation project. I was accompanied by two other Robotic Building Studio students, Yongyi Wu, Thierry Syriani, who are also currently working on their Master Thesis. All the results described here are the fruits of our joint work.
Description of the workshop
Our task was to respond in any way to the problem of the lack of interactivity in architecture encountered every day. Due to the limited time, the workshop lasted only five days, we decided to focus on the seemingly simple problem of automated facades. As a reference, we treated the blind system operating at the architecture department of TU Delft. We quickly identified the fact that this system is far from satisfying the hopes placed on it.
In the first part of the workshop, we focused on analyzing the disadvantages of the current system. We've determined that it works in a way that the user does not understand. The system reacts incorrectly to external conditions, and for an observer it may seem as if it functioned in a completely random manner. The reason for this may be that the blinds operate, as we presume, on the basis of a centrally controlled system. If there are no sensors (e.g. light sensor) installed in the architecture department, the system reacts to weather data provided by meteorological stations, which means that it does not take into account the most local conditions prevailing in the vicinity of the architecture department (a single cloud flying over the building). At least that would explain why blinds sometimes drop in the department. Of course, the reason may be different, for example, poorly calibrated sensors, but to be sure why the current system works badly was not our priority, because we had to quickly develop our own system. It is worth mentioning that among other serious problems of these blinds there is a very frequent change of behavior, and the inability to control them.
In a three-person team, Yongyi Wu, Thierry Syriani, and myself, we decided to offer a system based on many light sensors that would be located at short distances so as to ensure delivery of precise data to the system. For this purpose, we used the McNeel Grasshopper software together with Rhino 6 and Arduino microcontrollers, which we have programmed ourselves so that they measure the intensity of the incident light through photoresistors.
Our basic assumption was that the system must be able to adapt very locally. We did not accept such a situation in which zero one blinds are opened or closed regardless of whether e.g. on a fragment the tree no longer provides sufficient shading.
Our next goal was to gain some control over the system. Users usually prefer to keep control even over the best designed system. We designed some interactions that allow the user to control how the blinds work. Depending on the distance the user was in, the shutter was raised. We decided to assume that if the user comes close to the window, it probably means that he wants to look outside. The results were very satisfying and looked very natural and desirable.
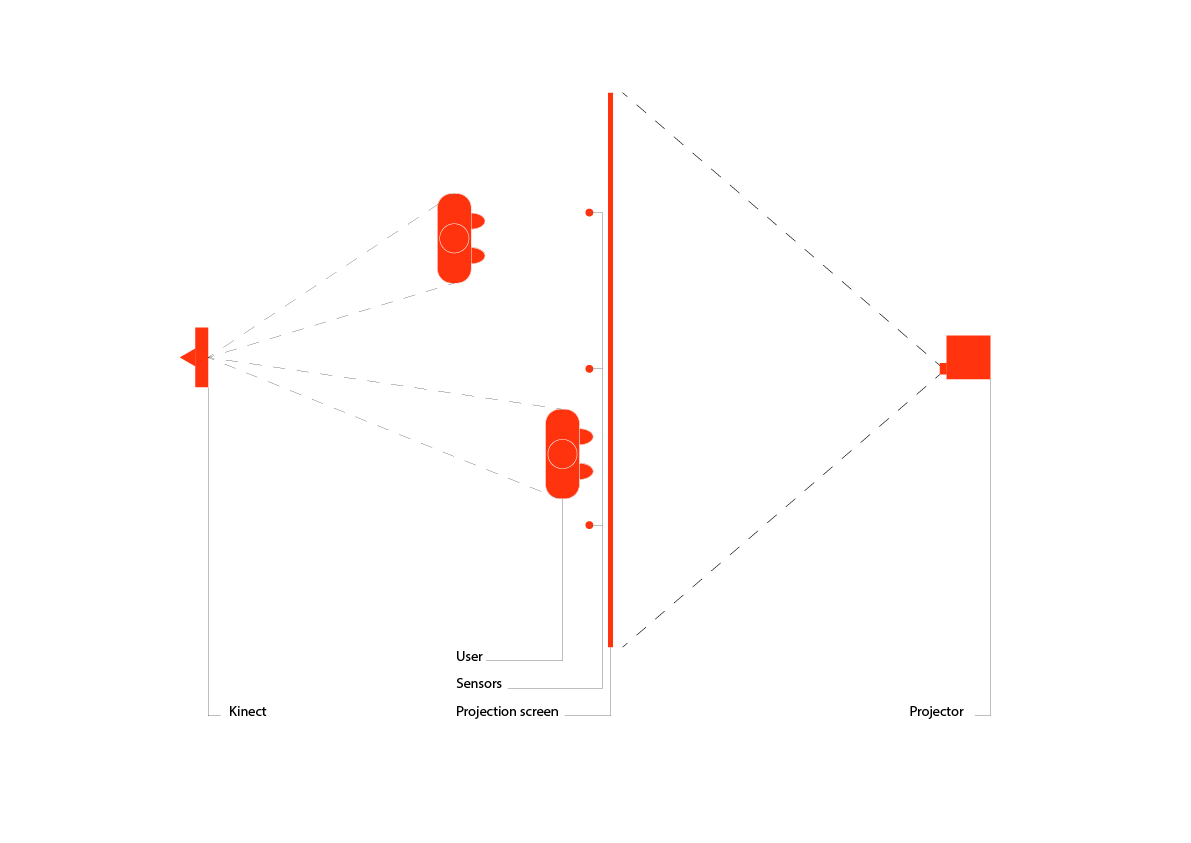
The first result of the workshop was a system responsive to environmental conditions and the presence of the user in a defined range from the installed sensors. Due to robbed time, we decided not to build a material model of the model discussed here. We decided to make the solution much simpler to implement and in turn bringing very similar results to those that would result in building a fully physical model. As shown in the illustration below, we decided to use a double-sided screen and projector, projector, luck photoresistors, Arduino board and Kinect camera. All these elements were connected using a computer using Rhinoceros 6 software, from McNeel with the Grasshopper add-on and the FireFly plug-in, allowing the connection of devices such as Arduino or Kinect. So we used all the inputs / sensors / sensors that in each case had to be used, but we abandoned the construction of actual mechanisms, like blinds that this system would control. Instead, we simply displayed the result on the screen using a projector. The designed system consisted of vertical belts that could be lowered or raised just as it already exists in our department. The main difference between the proposed solution and the functioning one was that our blinds were much narrower and each responded to the light sensor located closest to it, or to the presence of use that was just approaching it. Additionally, in order to avoid the impression of randomness and chaos, the position of each element was averaged to its neighbors and the reactions were slowed down (the system takes into account the history of measurements and averages the last measurements taken instead of relying on a unit value).
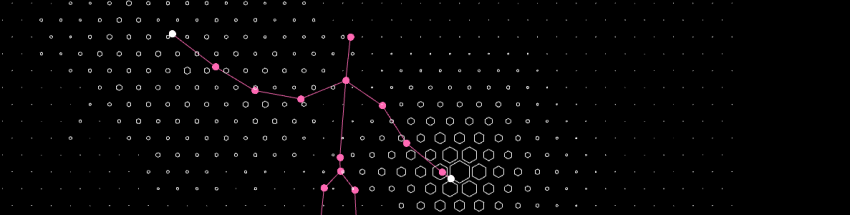
The second system was a kind of development compared to the first system, although we did not add any new sensors. However, the second system did not have all the functionalities of the first system. It relied less on environmental data and served more to build user interaction behind the created surface. A system introduced in the style of Agent-Based-Modelling. This time we used a hexagonal mesh which we treated each element as a separate panel. The programmed actions resembled a situation in which each panel would be controlled by its own supersonic sensor. As in the first proposal, bringing the panel closer resulted in its opening. The only difference was that after the maximum opening, it was closed in turn, even if the user did not change his position at that time. In addition, each panel opened if its neighbor opened, except for a fraction less. As a result, you could observe interesting visual effects resembling the propagation of circles of waves over the surface, bringing to mind a breathing plane because of the rhythm in which the interactions took place. This wall, however, was far from being a realistic design proposal for the facade system.
Reflection
I have the impression that the architectural community often lacks reflection on how we shape our environment. While the academic community and some practitioners are actively trying to characterize the architectural achievements and current processes, the approach of most architects is often devoid of reflection and its logic resembles behaviour typical of consumer culture for which it is characteristic to follow new trends without deeper consideration of their value, sources, and certainly a methodology that could be helpful in evaluating the architectural practice shaped by these trends.
During the workshops we definitely looked into the future. In the speculative formula, we were thinking about systems that could be implemented if there were no restrictions for designers. However, the results should be considered as very inspiring and show the direction of further testing and research.
For me personally, the most important experience was realizing the nature of interaction, being a system designer and its recipient at the same time, being able to draw conclusions in real time with empirically experienced system calculations that I had the pleasure to deal with.
I will definitely use these experiences in exploring the behavior of subsequent prototypes. I do not see much difference in the design of interactions due to the material used, so when designing inflatable structures I will face similar problems to those from the workshop