Shared:FinalG1
Siddharth Jain - Krishna Jani - Luuk Goossen - Stepan Serdiukov - Haobo Zhang - Pierre Oskam
Off-Earth Biology Lab
Slide 1: C.R.O.P stands for Cultivation Robust Operating Panel. The project was a proposal for the fabrication of a 1:1 scale prototype of a Panel that could be used in an outer space habitat to facilitate and automate the growth of plants. The idea was to explore the possibilities of having a biology Lab in an off earth-habitat environment. The presentation is divided into 8 Parts explaining the different aspects of the design proposal.
Slide 2: Conceptually, the lab is an interconnected series of underground caves that are constructed using robotic manufacturing techniques using swarm robots to excavate and simultaneously use In-situ materials to 3D print inside the caves.
Slide 3 & 4: Schematically we imagined that there would be life pods in the center and the walls of the cave would be used to produce food and run experiments for the lab.
Slide 5 & 6: We speculate the possibilities of growing plants under non-familiar conditions and the chart out a conceptual plan.
Slide 7: We now dive into the microscale and explore the geometry and components of a fragment.
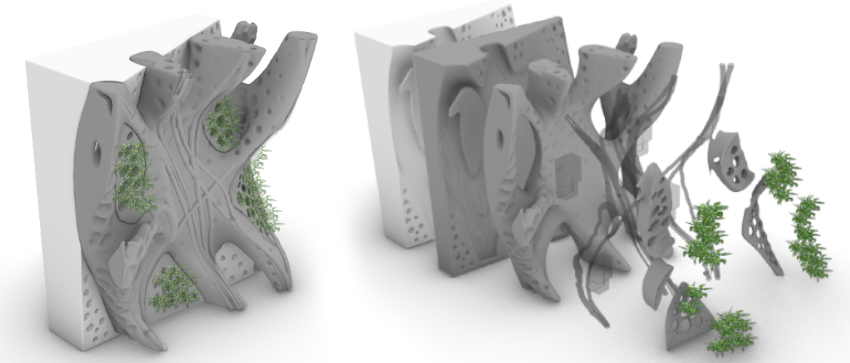
Slide 8: This is the fragment on the cave which we explored in-depth It is an integration of structurally optimized 3D printed mesh that has overlays of sensors and actuators in combination with the plants. It serves a dual purpose, it gives supports the cave structure and also has acoustical properties generated through the uneven surface and the plants.
Slide 9&10: In this slide, we show the different components of the Panel Starting with first milling the wall to prepare the receiving base for the 3d printed structural mesh with surface treatment for acoustical optimization. The sensors and wires are embedded in this surface as an integrated unit. The detachable 3D printed lids are overlaid on the Mesh with perforations that house the plants. The acoustic pattern is continued between the milled surface and the 3d printed surface for continuity.
Slide 11: In this slide, we further explain the process of structural optimization of the fragment. The form was derived through topological optimization and evaluating the stress lines.
Slide 12: The process of acoustical optimization is displayed through a simulation on the final panel design. The other three panels are iterations of the panel that were developed earlier in the process.
Slide 13&14: Till now we talked about Structural and Acoustical optimization. We also explore how will the plants survive in the environment With available resources, we tried to build the sensors and test the script.
Slide 15: These are the sensors that were used to test out the script.
Slide 16: This slide zooms out from the panel scale to propose an aeroponics system for the whole wall while mentioning the plants that would be possible to grow.
Slide 17&18: In these slides, we show simulations of the digital fabrication of the prototype using the Design to Robotic Production method. Slide 17- Milling using a robotic arm, Slide 18 - 3D printing the structural mesh.