Shared:2023W4G2HRI
Settling between the cracks of Mars
Group 2: Mohammad Behboodi - Sumeet Joshi - Dost Sahingoz - Majd Shahoud
HRI Lab
Introduction
The objective of this practical assignment is to gain an understanding of how robots can assist human workers in carrying out assembly tasks. Specifically, the task involves the selection and placement of a component to a certain location with the assistance of a robot (as demonstrated in Figure 1). In this process, the robot’s function is to identify building components using computer vision and to provide support to the human operator by shouldering the majority of the workload during assembly. The human operator, on the other hand, is responsible for utilizing their advanced cognitive abilities to manage the more intricate aspects of the task, including overseeing the handling and manipulation of pieces, orienting the pieces that the robot is manipulating, and ensuring that the task is completed safely and effectively.
Practicum
In Figure 1, a camera is used to locate the position of the table with its marked elements, which are recognized by software. The elements that are placed on the table are identified, and a Python program is utilized to determine the coordinates of the largest edge of a specific element. The robot arm is then directed to move towards this location and pick up the element from that edge with a particular angle. This process highlights the robot's ability to identify and manipulate objects with accuracy, while reducing the physical demands on human workers.
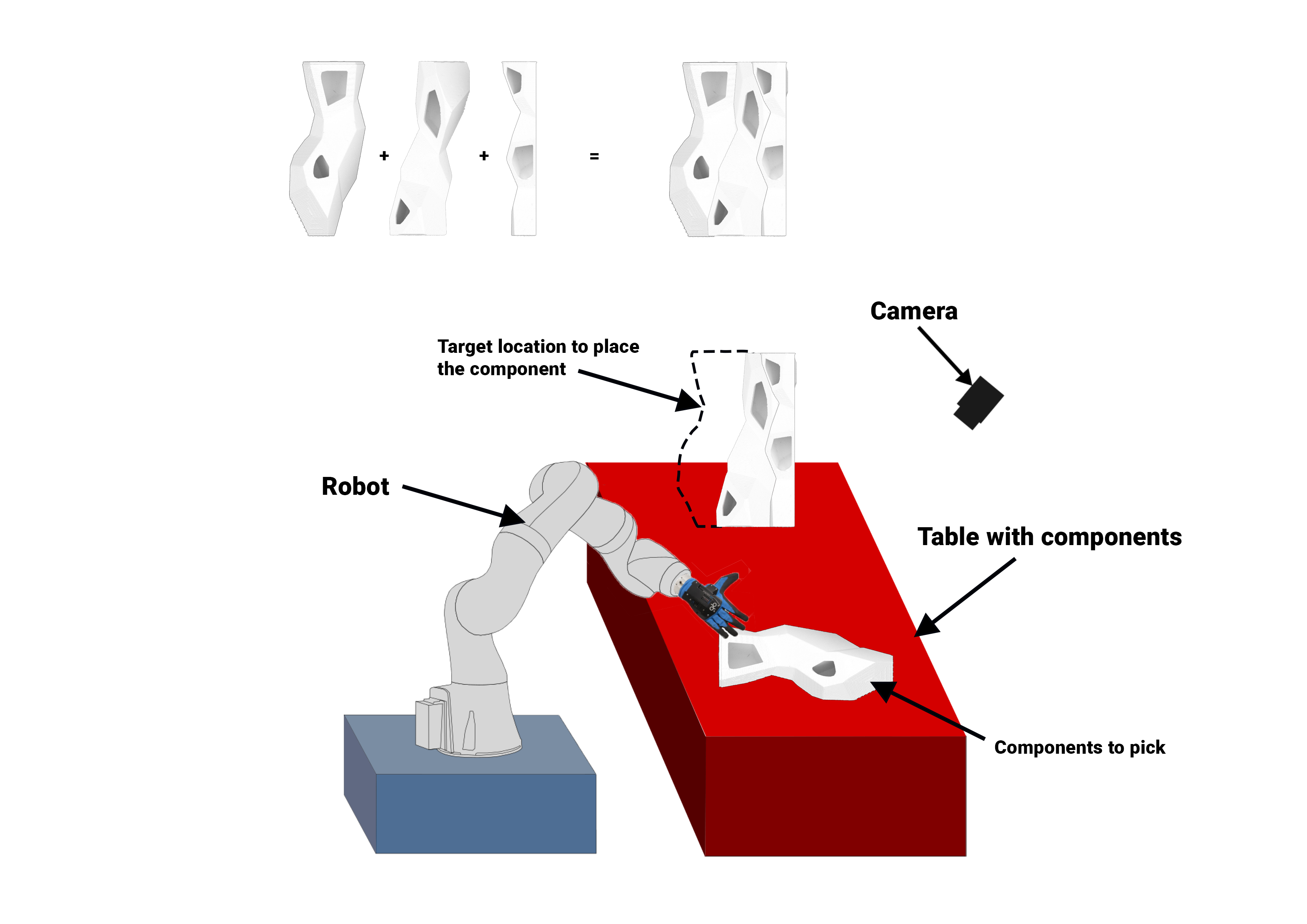 Figure 1: Overview of the experimental setup with robot and assembly components. The target for placing the component is shown with a dashed line.
Figure 1: Overview of the experimental setup with robot and assembly components. The target for placing the component is shown with a dashed line.
To ensure accurate positioning and orientation of the robotic arm for picking up a designated element, several inputs can be utilized. These inputs may include marking the table, using images captured by the camera, and specifying certain dimensions for programming the robotic arm. Once the robotic arm has successfully picked up the element, it is then transported to a predetermined location, which is indicated by dashed lines in the accompanying image. While it is possible to program the transportation of the element to a specific coordinate, the level of complexity and the necessity for accurate fixation render active collaboration between human and robot a more effective approach. The element may be either attached to other components or held in place for future fixation.
Reflection
Construction is a complex and challenging industry that requires a high degree of precision, efficiency, and safety. The introduction of robots in the construction industry has the potential to revolutionize the way tasks are carried out, significantly improving productivity, safety, and quality (Peternel et al., 2017). One of the most significant benefits of robots in construction is their ability to perform repetitive and monotonous tasks with a high degree of accuracy and consistency. These tasks may include bricklaying, concrete pouring, and material transportation. By automating such tasks, robots can save time and reduce the risk of human error, resulting in increased efficiency and productivity. Because of their ability to perform intricate and complex tasks, such as designing and building unique structures or creating intricate patterns in building facades, the overall creativity of the designers is enhanced. The leveraging capabilities of robots, can push the boundaries of architects and builders of what is possible in construction, resulting in more innovative and creative designs. Robots can also enhance safety in construction by performing tasks that are hazardous to human workers. These tasks may include working at heights, handling heavy objects, or working in hazardous environments. By delegating such tasks to robots, construction companies can significantly reduce the risk of workplace accidents, injuries, and fatalities (Llale et al., 2019).
Despite the numerous advantages of robots in construction, there are also limitations to their use. One of the most significant limitations is the cost of investment. Robots are expensive to acquire, program, and maintain, making them cost-prohibitive for many construction companies. Additionally, robots require specialized knowledge and training, which may not be readily available to all workers. Another limitation of robots in construction is their ability to adapt to unexpected situations. Robots are programmed to carry out specific tasks and may not be able to handle unexpected changes or variations in the construction environment. This can lead to delays, errors, and other issues that can impact productivity and safety. As with any technology, robots are susceptible to breakdowns and require regular maintenance to remain in optimal working condition.
The use of Human-Robot-Interaction (HRI) in construction tasks can be useful in many cases. For example, in the installation of large windows or panels, human-robot collaboration can be leveraged to lift and place the panels accurately and safely. The robot can handle the heavy lifting, while the human can provide input on the positioning and alignment of the panels. This would result in a faster installation process and reduce the risk of injury to human workers. In other words, using the superior physical power of the robot and superior cognitive capabilities of the human respectively (Peternel et al., 2017). Additionally, in the construction of tall buildings, robots can be used to lay rebar and pour concrete for the lower levels of the building, while human workers focus on the higher levels. This division of labor would increase efficiency and productivity while also reducing the risk of injury to human workers. Generally, robots can be used to carry out the repetitive and dangerous tasks of welding or cutting for example, while human workers can focus on the more complex aspects of the construction process. This would enhance safety and reduce the risk of accidents or injuries. Robots can also assist in the transportation and placement of the prefabricated elements, while human workers can focus on the finer aspects of assembly and ensuring quality control. This would lead to faster assembly times and reduce the risk of errors. To go even further, recent developments demonstrate new ways of HRI, where robots try to mimic fundamental human tasks, such as carrying. In a research from Agravante et al. (2019) about human-humanoid collaborative carrying, they address the challenge of synchronizing the movement of the lower mobile base with that of the upper body of the robot, as well as aligning both with the intention of the human operator. Besides the technical aspects, the social aspects shouldn't be overlooked. Gallo et al.’s (2023) study unveiled the possibility of merging behaviors that resemble those of machines with those that resemble humans in the case of waiting in an elevator. Overall, the research demonstrated the preference for machine-like robots in contrast to human-like robots, as they made the waiting experience more uncomfortable.
Overall, the key to successfully utilizing human-robot collaboration in construction tasks is to identify the tasks that can be automated and those that require human input. By leveraging the strengths of both humans and robots, construction companies can improve efficiency, productivity, and safety in their projects During our experiments with collaborative assembly using a robot arm, we observed that the robot moves smoothly and predictably. It is important to note, however, that testing all of the robot's movements beforehand is a crucial step in ensuring safety. While the robot is capable of performing tasks with accuracy and efficiency, it is important to take all necessary precautions to prevent accidents or injuries.
In addition to conducting thorough testing, implementing safety measures such as stop buttons and maintaining a safe distance from the robot during operation is essential. These measures help to ensure that human workers and the robot can work together safely and effectively. By following proper safety protocols, the potential risks associated with working with a robot arm can be minimized, allowing for a more seamless and efficient collaborative assembly process.
It is also important to note that ongoing training and education on the safe operation of the robot arm is necessary to ensure continued safety and success. Regularly reviewing safety procedures and protocols with all team members involved in the collaborative assembly process can help to maintain a safe and productive work environment.
Overall, while working with a robot arm in collaborative assembly has the potential to increase productivity and efficiency, prioritizing safety at all times is paramount. By taking all necessary precautions and regularly reviewing safety procedures, human workers and robots can work together effectively and safely to achieve their common goals.
References
Agravante, D. J., Cherubini, A., Sherikov, A., Wieber, P., & Kheddar, A. (2019). Human-Humanoid Collaborative Carrying. IEEE Transactions on Robotics, 35(4), 833–846. https://doi.org/10.1109/tro.2019.2914350
Gallo, D., Bioche, P. L., Willamowski, J. K., Colombino, T., Gonzalez-Jimenez, S., Poirier, H., & Boulard, C. (2023). Investigating the Integration of Human-Like and Machine-Like Robot Behaviors in a Shared Elevator
Scenario. Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction. https://doi.org/10.1145/3568162.3576974
Llale, J., Setati, M., Mavunda, S., Ndlovu, T., Root, D. E., & Wembe, P. T. (2019). A Review of the Advantages and Disadvantages of the Use of Automation and Robotics in the Construction Industry. The Construction Industry in the Fourth Industrial Revolution. https://doi.org/10.1007/978-3-030-26528-1_20
Peternel, L., Tsagarakis, N. G., & Ajoudani, A. (2017). A Human–Robot Co-Manipulation Approach Based on Human Sensorimotor Information. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25(7), 811–822. https://doi.org/10.1109/tnsre.2017.2694553