2023W4:References
MSc 2 IAP 2023: Rhizome 2.0
PROJECTS
CS (http://cs.roboticbuilding.eu/index.php/Shared:2019Final and http://cs.roboticbuilding.eu/index.php/2019MSc3)
HB/ RB graduation projects (https://repository.tudelft.nl/islandora/object/uuid%3A25f7cc18-7400-4c65-a205-15530982d504, http://cs.roboticbuilding.eu/index.php/project02:P5), https://drive.google.com/drive/folders/18dBlk9IpK4tr-U6HJwMl2wcB52fAlb8J, and
https://repository.tudelft.nl/islandora/object/uuid%3A0461dd93-d335-4e43-b194-a035805176d6
Bigelow (https://en.wikipedia.org/wiki/Bigelow_Expandable_Activity_Module)
READINGS
Bier, H., Khademi, S., van Engelenburg, C. et al. Computer Vision and Human–Robot Collaboration Supported Design-to-Robotic-Assembly. Constr Robot (2022). https://doi.org/10.1007/s41693-022-00084-1
Bier, H., Cervone, A., and Makaya, A. Advancements in Designing, Producing, and Operating Off-Earth Infrastructure, Spool CpA #4, 2021. https://doi.org/10.7480/spool.2021.2.6056
Pillan, M., Bier, H., Green, K. et al. Actuated and Performative Architecture: Emerging Forms of Human-Machine Interaction, Spool CpA #3, 2020. https://doi.org/10.7480/spool.2020.3.5487
Lee, S. and Bier, H., Aparatisation of/in Architecture, Spool CpA #2, 2019. https://doi.org/10.7480/spool.2019.1.3894
Bier, H. Robotic Building, Adaptive Environments Springer Book Series, Springer 2018 (https://www.springer.com/gp/book/9783319708652)
Hoekman, W. Regolith as future habitat construction material and bio chitinous manufacturing: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0238606
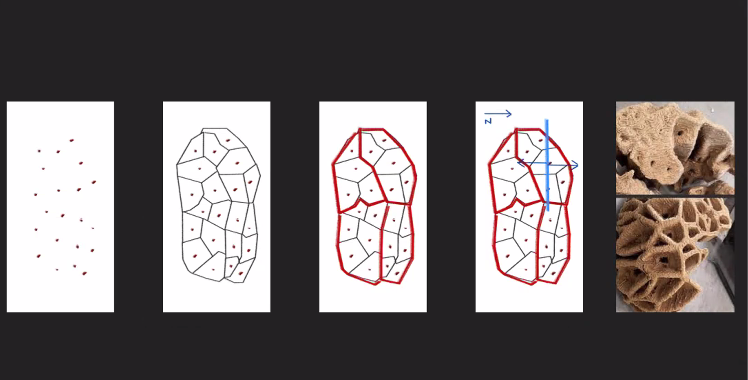
Literature on CV algorithms that employ structural reasoning by mapping a raster image - either noisy (first fig.) or floor plan drawing (second fig.) - into corresponding geometrical representation. This is equivalent to the problem addressed in the course, i.e., learning to map between an image of the Voronoi-like structure (in which the lines are not explicitly defined) to its geometrical counterpart (in which lines are surfaces are explicitly defined). This geometrical representation can subsequently be leveraged for the task at hand:
https://openaccess.thecvf.com/content_iccv_2017/html/Liu_Raster-To-Vector_Revisiting_Floorplan_ICCV_2017_paper.html
https://openaccess.thecvf.com/content/CVPR2022/html/Chen_HEAT_Holistic_Edge_Attention_Transformer_for_Structured_Reconstruction_CVPR_2022_paper.html
https://openaccess.thecvf.com/content/ICCV2021/html/Stekovic_MonteFloor_Extending_MCTS_for_Reconstructing_Accurate_Large-Scale_Floor_Plans_ICCV_2021_paper.html
PRESENTATIONS
Voronoi-based D2RP
TEMPLATES
Report:
https://docs.google.com/document/d/1fNNps7UfgIfoOH8G0ar-5Bzz26-up8Y4/edit
Premiere project (9GB):
https://drive.google.com/file/d/1fW5gJpLXPioM9SZoCJAiNOr817AWGZCu/view
EXAMPLES
Conceptual and material systems:
https://docs.google.com/document/d/1HuC4LMdFcbEiV-xcFDMZns1TAx9q0Gx2T3S5jMg7Wjs/edit?usp=sharing
Scalable porosity and componential logic: