2023IAStudio
MSc 2 IA Studio 2023: Rhizome 2.0
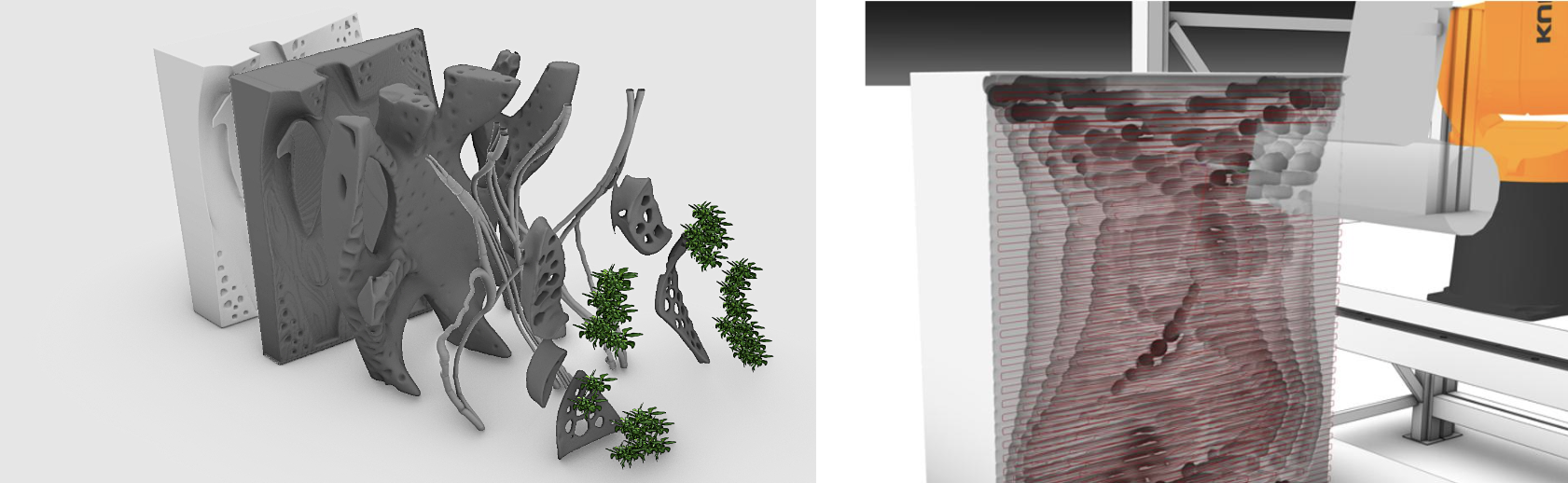
FRAMEWORK
In Spring semester 2023 students engage in the investigation of off-Earth habitats as computationally designed and robotically 3D-printed and assembled structures. Such habitats embed Artificial Intelligence (AI) in their sensor-actuator mechanisms that ensure life-support and allow users to customise their operation. Physical and software components are, in this context, deeply intertwined. Their static and dynamic modalities involve customization and adaptation, which will be achieved by means of Design-to-Robotic-Production and -Operation (D2RP&O).
The course content builds upon the ESA-funded project | Rhizome 1.0 from 2021-22 that focused on developing the design of subsurface 3D printed porous structures on Mars using regolith-based concrete that can be produced via In-Situ Resource Utilisation (ISRU). In the Rhizome 2.0 study starting 2023 the 3D printing approach will focus on possibilities to print with cementless concrete. An overview on ISRU is available here: Regolith as future habitat construction material.
While various studies have been implemented, the subdivision of space and the integration of environmental control remained sketchy. Also, the Computer Vision (CV) and Human-Robot Collaboration (HRC) supported assembly of the 3D printed components stayed underdeveloped. Hence, new approaches will be 2023 developed based on the assumption that the habitat serves as workspace and home to 3-5 astronauts.
Additional information is available in the brief: https://docs.google.com/document/d/1Y4WxILwKaIpaJbHCP3blSsODjmOjmZffSw1okusKMi8/edit
PRECEDENTS
Several architectural firms and research institutions have been developing ideas for off-Earth construction such as | Autonomous Additive Construction on Mars by Foster+Partners, | Rhizome by RB lab and | Marsha by AIspacefactory.
EXAMPLES
Mission, environment, requirements: http://100ybp.roboticbuilding.eu/index.php/project01:P1, http://100ybp.roboticbuilding.eu/index.php/project01:P3
Functional layout and 3D printing in-situ: http://cs.roboticbuilding.eu/index.php/project02:P5
Embedded vs. layered environmental control: https://docs.google.com/presentation/d/1tHFCSKI14wG1DPXZhUkpODqukF9c-3Bu/view#slide=id.p1
CV applications: http://uf.roboticbuilding.eu/index.php/project01:S2022G1P2 and http://uf.roboticbuilding.eu/index.php/project01:S2022G2P4
Ants simulation: https://www.youtube.com/watch?v=6f6vixralQI
Metaballs: http://www.codeplastic.com/2019/03/01/metaballs-sculpture/
Designing Collective Behavior in a Termite-Inspired Robot Construction Team: https://drive.google.com/file/d/1xiGG6fk9nCkOMrmeu1BVHFjnAY0pl4bi/view
REFERENCES
As, I. and Basu, P. (eds.), The Routledge Companion to Artificial Intelligence in Architecture, 2021.
https://doi.org/10.4324/9780367824259
Bier, H., Khademi, S., van Engelenburg, C. et al. Computer Vision and Human–Robot Collaboration Supported Design-to-Robotic-Assembly. Constr Robot (2022). https://doi.org/10.1007/s41693-022-00084-1
Bier, H., Cervone, A., and Makaya, A. Advancements in Designing, Producing, and Operating Off-Earth Infrastructure, Spool CpA #4, 2021. https://doi.org/10.7480/spool.2021.2.6056
Pillan, M., Bier, H., Green, K. et al. Actuated and Performative Architecture: Emerging Forms of Human-Machine Interaction, Spool CpA #3, 2020. https://doi.org/10.7480/spool.2020.3.5487
Lee, S. and Bier, H., Aparatisation of/in Architecture, Spool CpA #2, 2019. https://doi.org/10.7480/spool.2019.1.3894
Bier, H. Robotic Building, Adaptive Environments Springer Book Series, Springer 2018 (https://www.springer.com/gp/book/9783319708652)
TUTORIALS
Various tutorials for developing the design in Rhino Grasshopper: http://cs.roboticbuilding.eu/index.php/2023W4:Online
RESOURCES
Various software required for implementing the Rhino Grasshopper tutorials: http://cs.roboticbuilding.eu/index.php/2023W4:Download
SCHEDULE
Studio sessions and lectures are preliminarily scheduled as follows: https://docs.google.com/spreadsheets/d/1OaoXz1C9ZbPgeckIGXikOW4JW1EW4V5POB-ucsxlggk/edit
COORDINATORS & TUTORS
Henriette Bier, Arwin Hidding and Vera Laszlo (RB lab); Seyran Kahdemi and Casper van Engelenburg (AiDAPT lab); Micah Prendergast and Luka Peternel (CoR lab)
STUDENTS
Groups 1-3