|
|
| Line 31: |
Line 31: |
| | <br> | | <br> |
| | | | |
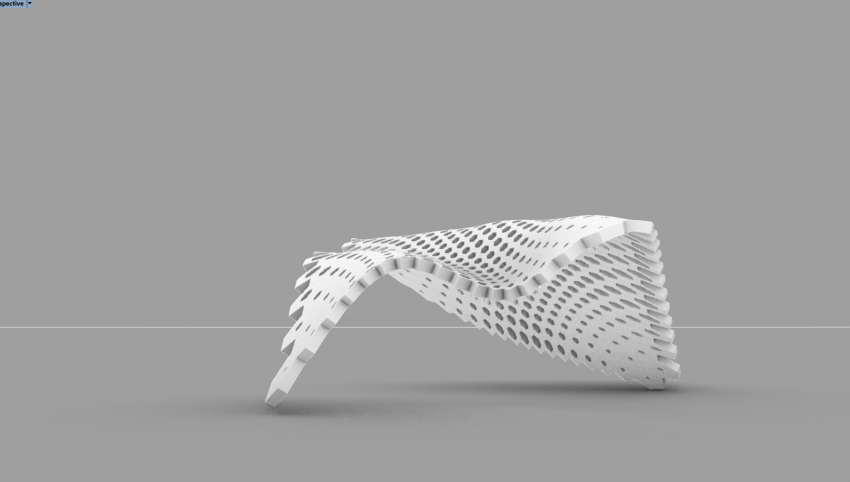
| − | [[File:sample.png | 850px]]
| |
| − |
| |
| − | ----
| |
| − |
| |
| − | Sophia - Karim - Shervin - Angelos - Adib - Mohamed - E - Ahmed - Mhun -
| |
| − |
| |
| − | ----
| |
| − |
| |
| − | <div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; border: 0px;">
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3|'''MAIN''']]
| |
| − | </div>
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3P1|'''Micro''']]
| |
| − | </div>
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3P2|'''Meso''']]
| |
| − | </div>
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3P3|'''Macro''']]
| |
| − | </div>
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3P4|'''Prototypes''']]
| |
| − | </div>
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3P5|'''Design''']]
| |
| − | </div>
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3P6|'''Robotic Production''']]
| |
| − | </div>
| |
| − | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center">
| |
| − | [[Shared:G3P7|'''Future Scenarios''']]
| |
| − | </div>
| |
| − | </div>
| |
| | <br> | | <br> |
| | | | |
| − | <br>
| |
| | ===Future Applications=== | | ===Future Applications=== |
| | | | |
Revision as of 15:03, 10 May 2018
Bits + Bites
Sophia - Karim - Shervin - Angelos
Future Applications
// Material Exploration
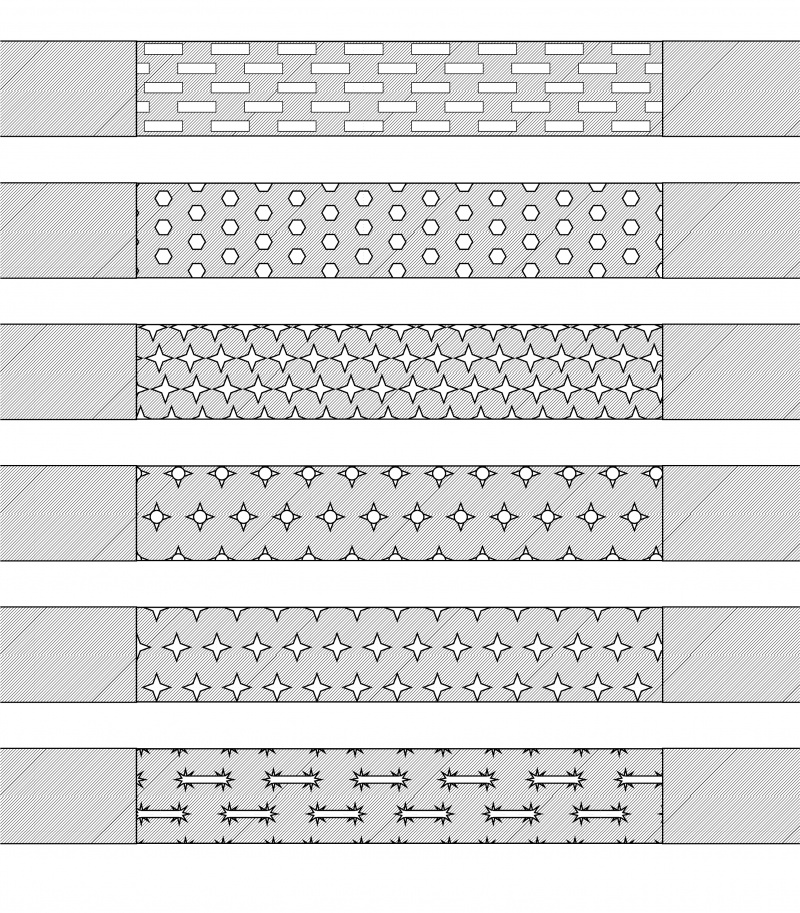
turning a flexible material into rigid by the addition of aggregates
3D printed geometric shapes to be precicely placed in a grid by a pick and place robot to create a 3D geometric pattern that would restrict bending
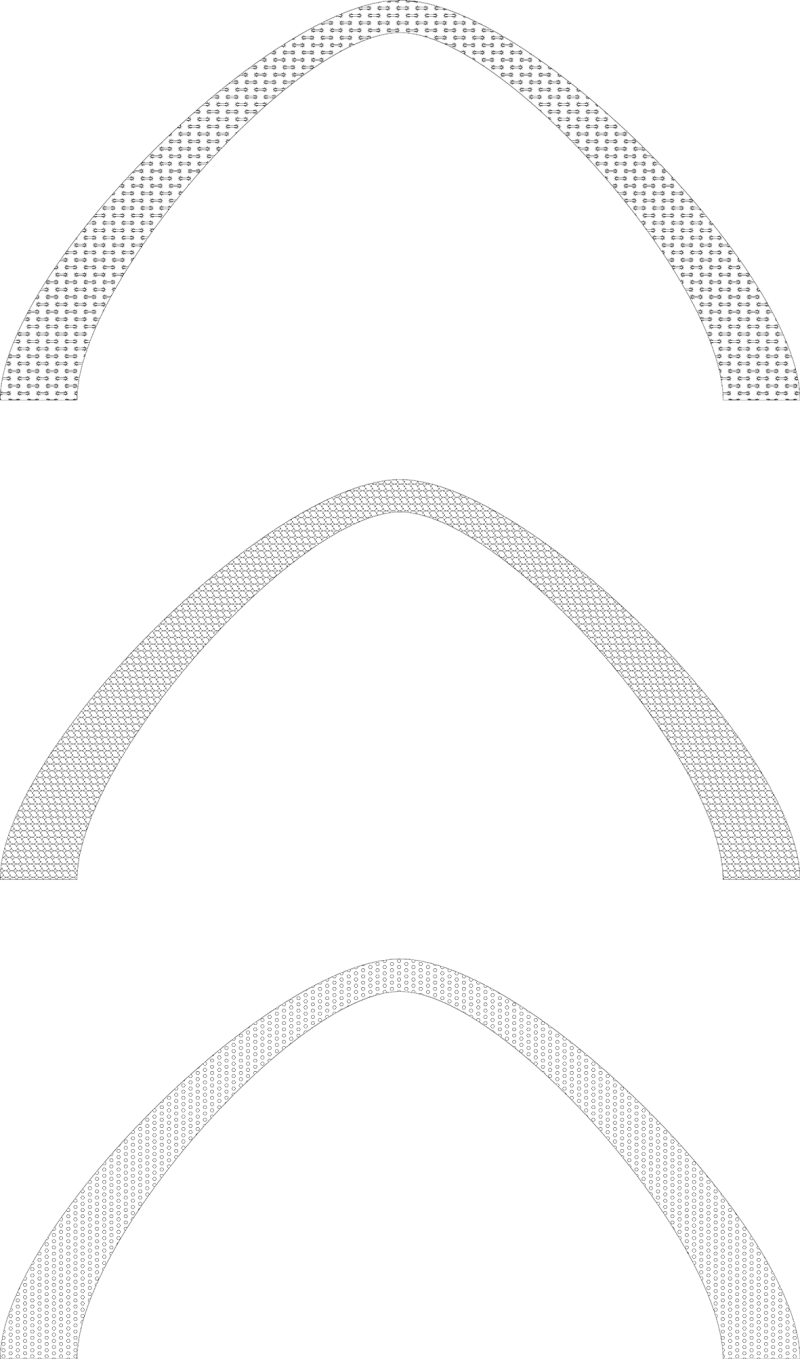
//twist (hinge)
//Walking Module