Difference between revisions of "W2"
| (2 intermediate revisions by one user not shown) | |||
| Line 10: | Line 10: | ||
<div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | <div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | ||
[[W2SCHEDULE|'''SCHEDULE''']] | [[W2SCHEDULE|'''SCHEDULE''']] | ||
| + | </div> | ||
| + | <div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | ||
| + | [[W2GROUPS|'''GROUPS''']] | ||
</div> | </div> | ||
</div> | </div> | ||
| Line 23: | Line 26: | ||
=='''COORDINATORS & TUTORS'''== | =='''COORDINATORS & TUTORS'''== | ||
| − | + | Sina Mostafavi, Henriette Bier and Yu-Chou Chiang | |
<br> | <br> | ||
<br> | <br> | ||
Latest revision as of 12:46, 4 February 2021
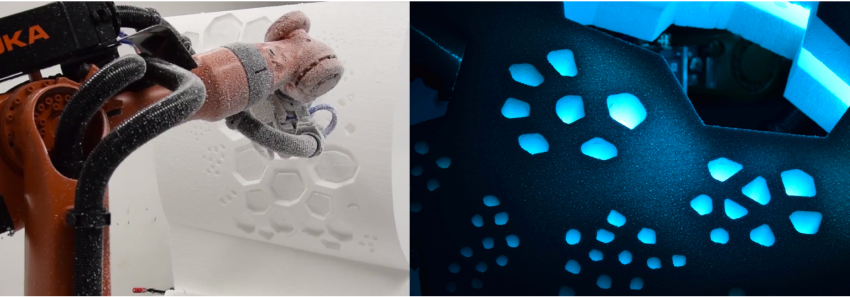
HYBRID COMPONENTIALITY
CONTENT & APPROACH
The 2nd workshop introduces students from TUD and DIA to Design-to-Robotic-Production (D2RP). D2RP links design to materialisation by integrating all (from functional and formal to structural) requirements in the design of building components, while D2RO integrates robotic devices into building components in order to facilitate spatial and climatic reconfiguration. Together they establish the framework for robotic production and operation at building scale. The main consideration is that in architecture and building construction the factory of the future will employ building materials and components that can be robotically processed and assembled. Thus D2RP&O processes incorporate material properties in design, control all aspects of the processes numerically, and utilise parametric design principles that can be linked to the robotic production.
COORDINATORS & TUTORS
Sina Mostafavi, Henriette Bier and Yu-Chou Chiang
STUDENTS
See groups 1-3