Difference between revisions of "W4SCHEDULE"
From cs
(→Design-to-Robotic-Operation: Design and Integration of a Meshed and Heterogeneous Wireless Sensor and Actuator Network into Cyber-physical Spaces) |
|||
| (2 intermediate revisions by one user not shown) | |||
| Line 1: | Line 1: | ||
__NOTITLE__ __NOTOC__ | __NOTITLE__ __NOTOC__ | ||
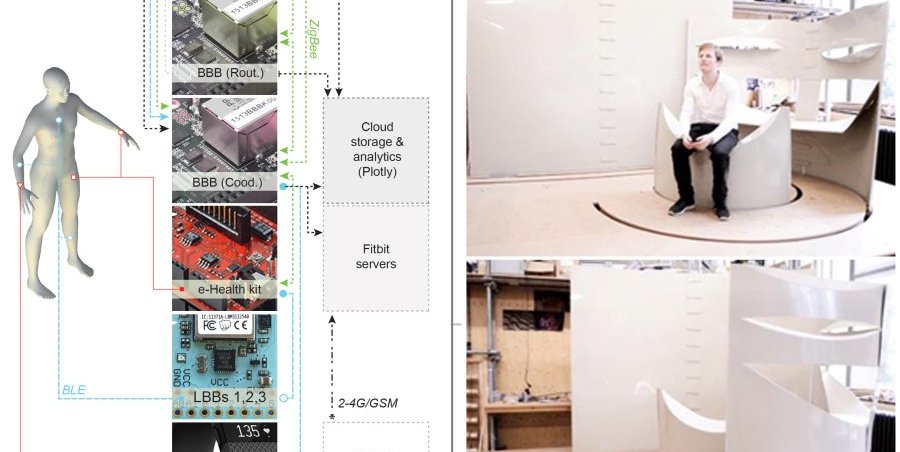
| − | ==''' | + | =='''D2RO: Design and Integration of a Meshed and Heterogeneous Wireless Sensor and Actuator Network into Cyber-physical Spaces'''== |
| − | [[File: | + | [[File:D2ro 2.jpg | 850px]] |
<div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; border: 0px;"> | <div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; border: 0px;"> | ||
<div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | <div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | ||
| Line 10: | Line 10: | ||
<div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | <div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | ||
[[W4SCHEDULE|'''SCHEDULE''']] | [[W4SCHEDULE|'''SCHEDULE''']] | ||
| + | </div> | ||
| + | <div style="float:left; width: 200px; height 30px; border: 1px solid #aaa; margin-right:10px;" align="center"> | ||
| + | [[W4GROUPS|'''GROUPS''']] | ||
</div> | </div> | ||
</div> | </div> | ||
| Line 17: | Line 20: | ||
<br>'''1st day:''' | <br>'''1st day:''' | ||
| − | <br> | + | <br> Introduction to D2RO and design brief. |
| − | <br> | + | <br> Design challenge, development and identification of intervention context, conceptualization of mechatronic systems within provided geometry. |
<br>'''2nd day:''' | <br>'''2nd day:''' | ||
| − | <br> | + | <br> Set-up of RPiWZ nodes; development and implementation of Sensor / Actuator systems pertaining to proposed intervention solution. |
| − | <br> | + | <br> Test-drive of mechatronic systems and debugging. |
| − | <br> | + | <br> Installation of required Python libraries for subsequent WSAN integration and operation, and integration of all RPiWZ nodes into a unified WSAN, where any node is able to access the information gathered by any other node. |
<br>'''3rd day:''' | <br>'''3rd day:''' | ||
| − | <br> | + | <br> Preparation of presentation. |
| − | <br> | + | <br> Final review. |
Latest revision as of 12:37, 4 February 2021
D2RO: Design and Integration of a Meshed and Heterogeneous Wireless Sensor and Actuator Network into Cyber-physical Spaces
SCHEDULE
1st day:
Introduction to D2RO and design brief.
Design challenge, development and identification of intervention context, conceptualization of mechatronic systems within provided geometry.
2nd day:
Set-up of RPiWZ nodes; development and implementation of Sensor / Actuator systems pertaining to proposed intervention solution.
Test-drive of mechatronic systems and debugging.
Installation of required Python libraries for subsequent WSAN integration and operation, and integration of all RPiWZ nodes into a unified WSAN, where any node is able to access the information gathered by any other node.
3rd day:
Preparation of presentation.
Final review.